The team’s brand new semester starts off by executing the ideas that were discussed to make this project successful. With our deadline set to have deliverable results by the end of March this team is focused on bringing these concepts to life in the time we have left.
A New Year for the Fish

Image 1: A couple of Chinook spotted in December
We have our thanks to Dr. Allee form South Bay Clean Creek Coalition (SBCCC) for consulting us of the current status concerning the spawning of the Salmon. For a female Salmon, it’s important for them to select the right location where there is a good flow of water that can provide enough oxygen to their eggs, they will then die after completing their parental duty of securing the egg nest. The SBCCC organization counts these carcasses for record keeping and also formulates an estimation of Salmon in the river. The organization believes that around 100 fish returned to spawn this year; however, that number is in the best case scenario.
It’s extremely difficult to observe any of the hatchlings at this time of year because of the recent rains that we had in the Bay area. This causes sediment deposits to alter the properties river by decreasing visibility, finding fish at this moment is like trying to find a needle in a haystack. Conditions will return to normal towards the beginning of next month for testing the device.
The Brains of the System
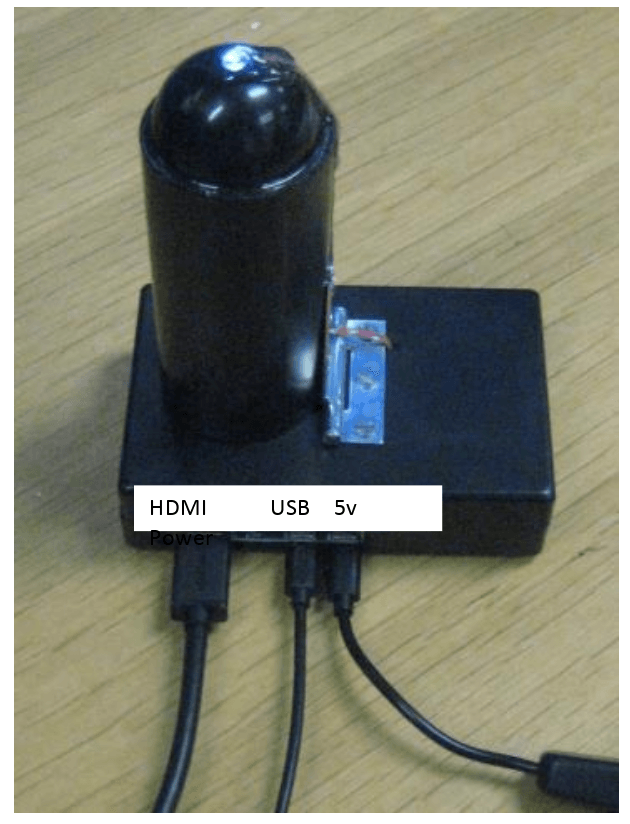
We have acquired the Jetson TX2 and using it to analyze the images and videos collected from the river. This was made for AI application so it should have no problem doing the work we want it to do. The team intends to mount this device on the final product equipped along with a webcam to perform real-time analysis, so we have to be sure that it’s container is air and water tight. Future iteration of the project can take advantage of this device’s features and processing power. It currently has Jetpack and Ubuntu installed to equip it with software tools.

Imge 2: The Jetson TX2 by NVIDIA